Po ďalšom viac ako mesiaci drobnej práce sa mi podarilo oživiť všetky tiahla a servá.
Ako-tak som naladil hraničné polohy.
Oživil som komunikáciu od diaľkového ovládača až po servá.
Takže áno :-) #DexHand funguje.
Trochu som upravil aj diaľkový ovládač. Na prednú stranu som pridal ďalšie dva gamepady (joysticky). Vedľa displaya pribudlol na ľavej strane rotačný enkóder (ten modro-čierny gombík) a vpravo je nové päťsmerové navigačné tlačítko.
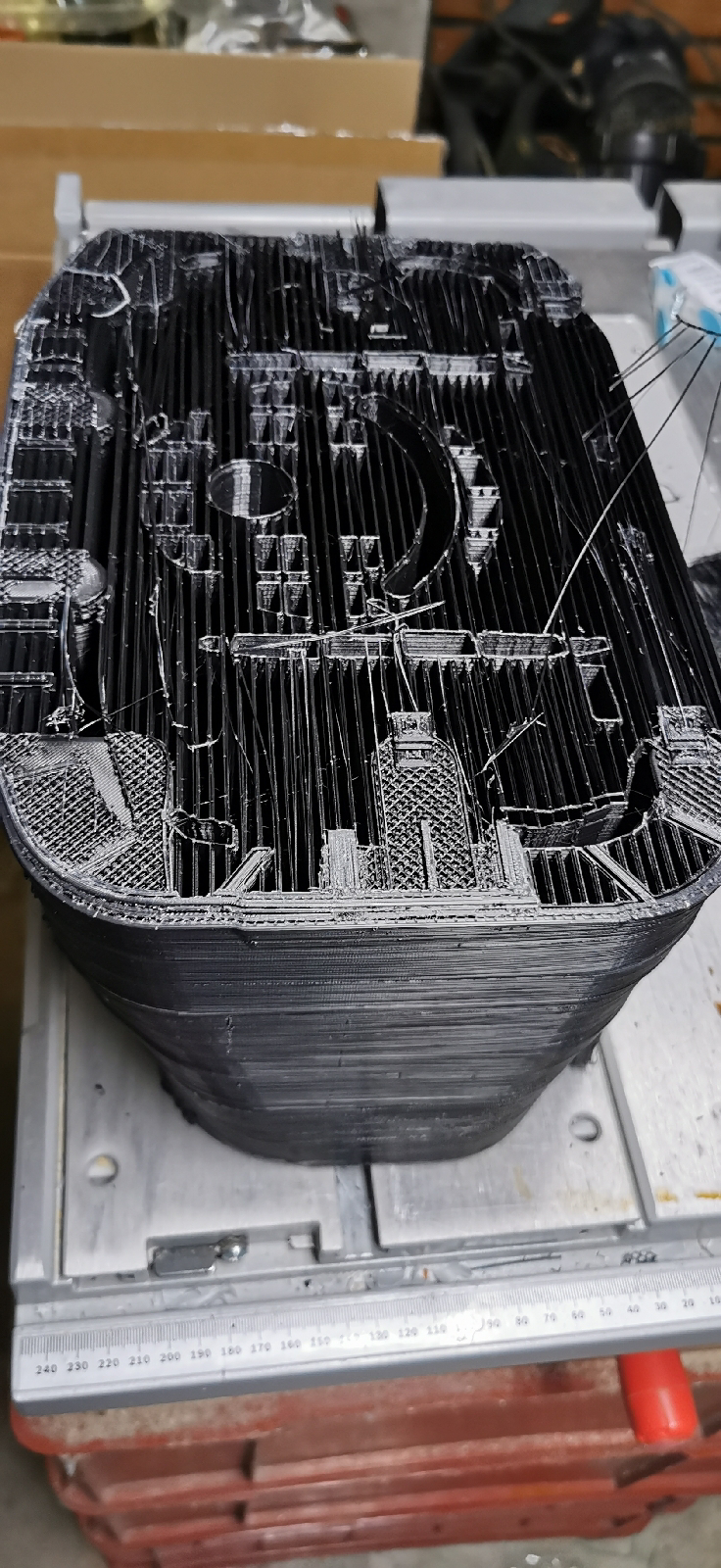
Po dlhom čase námahy a trápenia sa podarilo vytvoriť jednodielny trup pre robota NimbRo-OP2X
Výsledok vyzerá celkom sľubne.
Trup sa mi nedarilo vytlačiť ako jeden kus, vždy sa to pokazilo. Najprv som to tlačil z ABS ale kvôli tomu, že to je dosť veľký diel a vplyvom tepelnej roztažnosti vznikali praskliny. Zároveň ten diel potreboval veľmi veľké množstvo support-materiálu, prakticky celý vnútorný priestor mal byť vyplnený suportom.
Medzivýsledky boli takéto:
Tieto snahy prebiehali koncom jari 2023.
Odhadovaný čas tlače bol vždy okolo 3 týždňov.
Pochopil som, že vytlačiť taký veľký diel z ABS nie je v mojich technických možnostiach.
Preto som rozdelil model trupu na tri menšie diely a pokúšal som sa to vytlačiť tak. Vďaka rozdeleniu sa mi podarilo odbúrať veľké množstvo support-materiálu. Vrchná časť trupu (ramená) mala byť tlačená samostatne a predošlé dve časti nepotrebovali vytvárať support pod ramenami.
Naďalej som skúšal použiť ABS. Ale ABS naďalej prasklo, tak som nakoniec musel uznať, že to vytlačím iba z PLA.